Achievement:
Data assimilation techniques allow us to combine model dynamics and observations, along with their inherent errors and uncertainties. In this work we focus on dynamics problems described by waves, i.e. by hyperbolic partial differential equations. The focus is to improve the estimation of the phase and amplitude of waves, as a function of time and space, and further, to more common case wherein observations are spare, yet of high quality. The dynamic likelihood filter is an approach, rather than a filter per se and is applicable to particle filters, ensemble and other Kalman Filters, among others.
The improved phase estimates arise from using the characteristics of the waves in the estimation process, which in turn requires the derivation of equations for the evolution of wave phase and amplitude uncertainties. The improved overall estimates, however, results from casting the posterior distribution of the state in terms of dynamic and evolving likelihoods. Our framework is significantly better at tracking the phase and amplitude of the estimates of the waves, than conventional filtering. It also has the unique ability to make Bayesian predictions. This is accomplished by using present and past observations and constructing with these, likelihood projections into the future.
Significance and Impact:
Wave phenomena are ubiquitous in natural and engineering problems. Better estimates of wave processes can lead to better ocean climate and atmospheric weather predictions, better of the sources of earthquakes and many interstellar phenomena modeled by waves. Better acoustic, radio, and optical wave predictions have significant impact in technology and in industry.
Research Details
- The dynamic likelihood filter was developed in 2017 and appears in Quart. J. of the Roy. Soc. Meteorology, doi:10.1002/qj.3143 and in this work was significantly improved by the use of Gaussian processes to handle the dynamic likelihood.
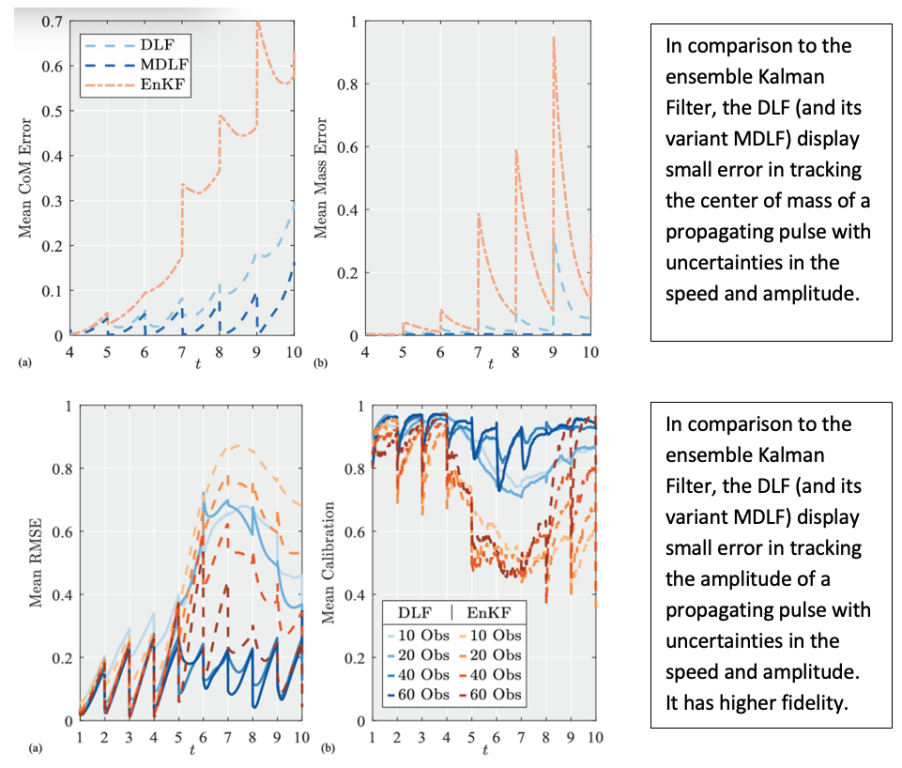
- The method was tested against the state-of-the-art method and shown to be uniformly superior in capturing phase and center of mass information. The method is especially better when the data is sparse but has high certainty.
- We demonstrated that the method can make Bayesian forecasts and this is able to do things other estimating formalisms cannot.
Sponsor/Funding: ORNL DR
PI and affiliation: Juan M. Restrepo, ORNL.
Team: Juan M. Restrepo (ORNL) and Dr. Dallas Foster (MIT).
Citation and DOI:
- Foster, D. and Restrepo J.M., “An Improved Framework for the Dynamic Likelihood Filtering Approach to Data Assimilation,” Chaos, 053118, 2022. DOI: 10.1063/5.0083071.
Summary:
A Bayesian data assimilation scheme is formulated for advection-dominated or hyperbolic evolutionary problems, and observations. It uses the physics to dynamically update the likelihood in order to extend the impact of the likelihood on the posterior, a strategy that would be particularly useful when the observation network is sparse in space and time and the associated measurement uncertainties are low.
The filter is applied to a problem with linear dynamics and Gaussian statistics, and compared to the exact estimate, a model outcome, and the Kalman filter estimate. By comparing to the exact estimate the dynamic likelihood filter is shown to be superior to model outcomes and to the Kalman estimate, when the observation system is sparse. The added computational expense of the method is linear in the number of observations and thus computationally efficient, suggesting that the method is practical even if the space dimensions of the physical problem are large.

